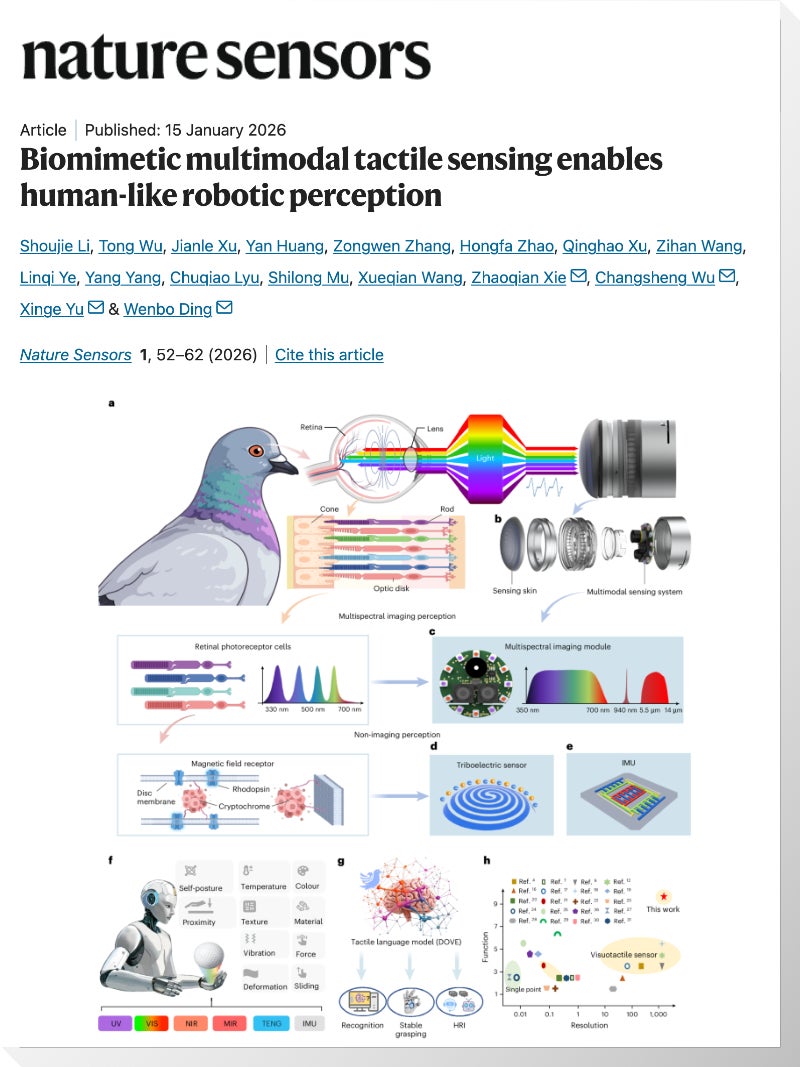
Biomimetic multimodal tactile sensing enables human-like robotic perception
- January 15, 2026
Shoujie Li, Tong Wu, Jianle Xu, Yan Huang, Zongwen Zhang, Hongfa Zhao, Qinghao Xu, Zihan Wang, Linqi Ye, Yang Yang, Chuqiao Lyu, Shilong Mu, Xueqian Wang, Zhaoqian Xie, Changsheng Wu, Xinge Yu & Wenbo Ding
Abstract
Tactile perception is essential for skilled robotic manipulation, yet current systems are limited by low sensor resolution, incomplete modality integration and insufficient interpretation of complex tactile signals. Here we present the Superior Tactile Sensor (SuperTac), a biomimetic, multimodal tactile sensor inspired by the multispectral vision of pigeons. SuperTac integrates multispectral imaging (MIR to ultraviolet light) with triboelectric and inertial sensing into a single 1-mm-thick light-field-modulated skin comprising conductive polymer, fluorescent, reflective and supporting layers. The sensor combines pressure-adaptive force sensing with high-resolution (0.00545 mm2 px−1) and high-precision measurements across force (0.06 N accuracy), position (0.4 mm accuracy), temperature (0–90 °C range), proximity (<15 cm range) and vibration (0–60 Hz range). It achieves over 94% accuracy in discriminating texture, material, sliding, collision and colour. To interpret these rich multimodal data, we developed DOVE, an 8.5B-parameter tactile language model that enables sophisticated understanding of tactile stimuli. This integrated sensing and interpretation framework could bring robotic touch perception closer to human-like capabilities, with potential applications in manufacturing, healthcare and service robotics.
Link [Biomimetic multimodal tactile sensing enables human-like robotic perception]